
首页 > 技术 安霸发布用于自动驾驶的集中式 4D 成像毫米波雷达架构
安霸发布用于自动驾驶的集中式 4D 成像毫米波雷达架构
Ambarella(下称“安霸”),近日领先业界首发集中式 4D 成像毫米波雷达架构,它既可以对原始毫米波雷达数据进行集中处理,也可以与其它传感器输入,例如摄像头、激光雷达和超声波,进行深入的底层融合。这一突破性的架构为 ADAS 和 L2+ 至L5 的自动驾驶系统以及智能机器人的 AI 算法,提供了更高级的环境感知和更安全的路径规划。安霸傲酷独特的毫米波雷达技术,使用 AI 算法支持雷达波形对周围场景的动态适应,可输出精度高达 0.5 度角分辨率、每帧高达数万个点的超密集点云,并且有效工作距离超过 500 米。这所有的性能指标,都以少了一个数量级的天线 MIMO 通道来实现,这样不仅降低了数据带宽,功耗也更低。搭载傲酷技术的安霸集中式 4D 成像毫米波雷达,感知系统更灵活,性能更高,助力系统集成商在下一代的雷达设计中占得先机。
“2021 年,全球市场汽车 ADAS 领域生产了约 1 亿个毫米波雷达。”全球知名市场研究与战略咨询公司 Yole Group 旗下的 Yole Intelligence 的射频设备与技术团队首席分析师 Cédric Malaquin 解释说。“随着汽车安全方面的法规要求不断提高,以及更先进的自动驾驶系统的逐渐推进,我们预计到 2027 年这一数量将增长 2.5 倍”。事实上,主机厂从目前每辆车配置 1-3 个毫米波雷达,已演变为每辆车至少配置 5 个毫米波雷达[1]。此外,关于毫米波雷达是应该采用分布式模块处理,还是集中式处理,以及关联的开发如何做,行业内有针锋相对的观点。一种做法是将多个雷达的数据集中式处理,这将使得主机厂获得更高性能的成像毫米波雷达系统,以实现新的 ADAS/AD 功能,同时优化毫米波雷达模组的成本。
这项独特的、极具性价比的新架构,终于在安霸 CV3 AI 域控制器主芯片上得以实现。安霸优化了算法,在CV3芯片上增加了专为毫米波雷达信号处定制的硬件单元。CV3 的每瓦特 AI 性能优势在业内逐渐被更多客户充分认识,其高计算性能和大内存容量使得 4D 毫米波雷达算法充分发挥,得到具有高点云密度、长探测范围 和高灵敏度的雷达感知结果,这让搭载单颗 CV3 的自动驾驶车辆和机器人也能高效地集中多传感器的实时处理感知、底层融合和路径规划。
安霸总裁兼 CEO 王奉民说:“业界尚未有其他半导体和软件公司同时在毫米波雷达算法、摄像头视觉影像处理,以及AI加速引擎等几个方面拥有领先的全栈能力。这些专业能力让我们能够创建一个前所未有的集中式域控处理架构,凭借 CV3 行业领先的性能功耗比,把傲酷毫米波雷达算法的领先优势更好发挥出来,有效地实现全新的 AI 感知、传感器融合和路径规划,这将有助于我们更深层地挖掘出 ADAS、自动驾驶和机器人市场的全部潜力。"
友商的 4D 成像毫米波雷达技术因数据量太大,难以有效传输和集中化处理。提供 4D 成像毫米波雷达所需的高角分辨率需要每个模块使用数千个 MIMO 天线,而它们每秒会产生数万亿 bit 的数据,同时,每个雷达模块将消耗超过 20 瓦的功率。一辆车需要至少六个雷达模块,其数据量也将倍增,因此,要集中处理数千根天线上的毫米波雷达数据,在技术上极为困难。
通过 AI 算法动态控制现有 MMIC 设备调制雷达波形,并使用 AI 算法来创建虚拟天线阵列,傲酷雷达技术将这种新架构中每个 MMIC 雷达头的天线阵列减少到 6 发射 x8 接收,并且在前端无需接雷达处理器。其结果就是,MMIC的数量大幅减少,同时实现了极高的0.5度方位角和俯仰角分辨率。此外,安霸的集中式架构在最大占空比的情况下,功耗明显降低,数据传输的带宽减少了 6 倍,不需要边缘端的雷达处理,也因此避免了信息过滤和传感器信息损失。
性价比高、软件定义的集中式架构还可以根据实时情况,在不同的传感器类型之间和同一类型的传感器之间动态分配 CV3 的处理资源。例如,在极端的雨天条件下,远程摄像头的有效数据会减少,CV3 可以将其部分资源转移,以增强毫米波雷达数据处理 性能。同样,如果车辆在雨天行驶在高速公路上时,CV3 可以专注于来自正前方的毫米波雷达传感器数据,以进一步扩大车辆的探测范围,同时提供更快的反应。这种对场景的自适应优化,是基于边缘处理的架构无法实现的,因为在边缘处理架构中,毫米波雷达数据是分布在每个模块中进行处理的,而处理性能是为最坏的情况而准备的,因此毫米波雷达的性能 往往没有得到充分利用。
这两种不同的毫米波雷达处理方法在下表中进行了总结:
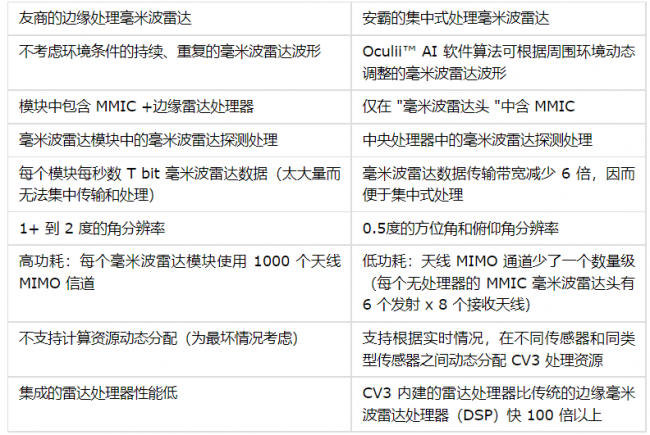
CV3 标志着安霸下一代 CVflow® 架构的首次亮相,它包含有神经网络矢量处理器和通用计算矢量处理器,两者都包含了毫米波雷达专用信号处理。这些处理器在协同工作下,结合傲酷先进的雷达感知算法,可达到比传统边缘毫米波雷达处理器快 100 倍的高性能。
新款集中式架构的优势还包括更容易进行 OTA 软件升级,以便未来不断改进和适应新需求。相比之下,在确定每个模块使用的处理器和操作系统之后,每个边缘毫米波雷达模块的处理器必须单独更新;而单一的 OTA 更新可以直接推送到 CV3 主芯片,并在系统的所有雷达头中汇总。这些雷达头只需要雷达收发芯片 而不需要雷达处理器,这就降低了前装的成本,以及在发生事故后更换的材料成本(大多数毫米波雷达位于车辆的保险杠后面)。对比新一代集中式毫米波雷达软件更新的便利,由于传统的分布式雷达更新软件比较复杂,如今部署的许多毫米波雷达模块从未更新过软件。
新款集中式毫米波雷达架构的目标应用包括 ADAS 和 L2+ 至 L5 自动驾驶汽车,以及自主移动机器人(AMR)和自动引导车(AGV)机器人。这些设计通过安霸统一而灵活的软件开发环境得到简化,为汽车和机器人开发人员提供了一个可升级的软件平台,性能范围从 ADAS 和 L2+ 一直延伸到 L5。
责任编辑:赵龙
文章来源://www.profoottalk.com/2022/1208/3103.shtml